
Equipa & Recursos
A infraestrutura TEC4SEA conta com uma equipa permanente composta por investigadores e contratados do INESC TEC e do CINTAL. A experiência da equipa abrange uma multiplicidade de tópicos que podem ser agrupados nas seguintes áreas genéricas:
- Sensores e tecnologias óticas e eletrónicas
- Comunicações e redes de dados
- Acústica submarina e processamento de sinal
- Robótica e sistemas inteligentes
A equipa está distribuída pelos dois polos que a TEC4SEA atualmente tem, no Porto e em Faro, duas das principais cidades costeiras de Portugal:
- Campus do Instituto Superior de Engenharia do Porto/Instituto Politécnico do Porto, Porto
- Campus da Faculdade de Engenharia da Universidade do Porto, Porto
- Campus de Gambelas, Universidade do Algarve, Faro
É também nestes dois polos que se encontram sediados os principais laboratórios, infraestruturas e recursos que a TEC4SEA possui, com a exceção dos que se encontram deslocados em instalações portuárias.

Equipa

Alfredo Martins
Investigador do Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Professor do ISEP/IPP

Ana Paula Lima
Investigadora do Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Responsável pela comunicação no Tec4Sea Estratégia

Aníbal Matos
Administrador INESC TEC Professor na Faculdade de Engenharia da Universidade do Porto (FEUP)

António Silva
Investigador no Laboratório de Processamento de Sinais (SiPLAB) Professor na Universidade do Algarve

Carlos Pinho
Business Developer Manager do TEC4SEA

Eduardo Silva
Coordenador da infraestrutura Tec4Sea e da estratégia Tec4Sea do INESC TEC Professor do ISEP/IPP

Henrique Salgado
Investigador no Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Coordenador da área de ótica e eletrónica. Professor na Faculdade de Engenharia da Universidade do Porto (FEUP)

José Miguel Almeida
Coordenador do Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Professor ISEP/IPPCoordinator of the Center for Robotics and Autonomous Systems (CRAS – INESC TEC)Professor at ISEP/IPP

José Carlos Alves
Investigador no Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Professor na Faculdade de Engenharia da Universidade do Porto (FEUP)

Luís Pessoa
Investigador do Centro de Telecomunicações e Multimedia (CTM – INESC TEC) Coordenador da área de Tecnologias Óticas e Eletrónicas

Marta Barbas
Adjunta da Administração Serviço de Apoio à Angariação de Financiamentos

Nuno Cruz
Coordenador do Centro de Robótica e Sistemas Autónomos (CRAS – INESC TEC) Professor na Faculdade de Engenharia da Universidade do Porto (FEUP)

Paulo Mónica
Investigador responsável da infraestrutura Tec4Sea

Pedro Jorge
Investigador do Centro de Fotónica Aplicada (CAP – INESC TEC) Professor da Faculdade de Ciências da Universidade do Porto (FCUP)

Rui Campos
Investigador no Centro de Telecomunicações e Multimédia (CTM – INESC TEC) Coordenador da área de redes sem fios
Equipamentos
A maior parte do equipamento da infraestrutura está-se distribuído pelos seus vários laboratórios. No entanto, e atendendo à missão da TEC4SEA, há um conjunto muito vasto de equipamento de campanha para apoio a missões de mar, que vai desde sonares multifeixe a pesadas estacões de fundo, sistema de localização acústica, arrays de hidrofones, fontes acústicas, bóias, e várias plataformas robóticas, com várias configurações e capacidades. A deslocação e operação deste equipamento é apoiada por uma pequena flotilha de embarcações (locais e costeiras), capaz de assegurar suporte a missões de até quatro dias, ate 60 NM de costa (correspondendo a profundidades de até 4500 metros) e um conjunto de reboques para assegurar o deslocamento deste equipamento entre os laboratórios e o litoral.









Laboratórios

Laboratório de Tecnologias Óticas e Eletrónicas
Este laboratório tem capacidades genéricas na área das tecnologias óticas e eletrónicas. Tem capacidade de efetuar testes de Bit Error Rate até 13 Gbps e de caracterização de dispositivos optoelectrónicos até 20 GHz e dispositivos eletrónicos até 50 GHz.
Equipamento a destacar:
- Osciloscópio de amostragem digital, Agilent 90000, 20GSamples / s;
- Gerador de padrões e detector de erros, Agilent N4901B-100, 13 Gbps;
- Vector Network Analyzer, Agilent E8363B, 40 GHz;
- Gerador de sinal, Agilent E8257D, 40 GHz;
- Gerador de sinal vetorial, Rohde and Schwarz SMJ100A, largura de banda de 6 GHz, 100 MHz; Analisador de espectro elétrico, Agilent E4448A, 50 GHz, Opções: Ext. Mixer, Digital Demod., Noise Figure, Phase Noise;
- Lightwave Component Analyzer, Agilent E8703B, 20 GHz, modulador / fotodetector ótico de 1550 nm;
- Analisador de espectro óptico, ANDO AQ6317B, resolução de 0,1 nm;
- Mainframe do osciloscópio, Agilent 86100C, com módulo óptico de 40 GHz / elétrico de 50 GHz;
- Receptor óptico, Agilent, 10 GHz;
- Outros: controlador de laser díodo, modulador Mach-Zehnder 12 GHz com driver, moduladores de eletro-absorção 40 GHz / 60 GHz com driver, laser de modulação direta 12 GHz com controlador TEC, EDFA de bancada, atenuador óptico MM / SM, laser ajustável 1510nm-1590nm, Controladores ópticos de polarização, analisador / contador de intervalo de tempo com resolução de 8ps, divisores ópticos / RF e circuladores.
Laboratório de Robótica e Sistemas Robóticos Autónomos
O Laboratório de Robótica possui os equipamentos e ferramentas necessários para a integração de sistemas de carga útil a bordo das plataformas robóticas (nos níveis mecânico, elétrico e computacional). Também está equipado com dois tanques de teste (dimensões LxLxD: 10m x 6m x 5m e 4,5m x 4,5m x 2m) onde os sistemas subaquáticos podem ser testados, bem como duas câmaras hiperbáricas que vão até 200 e 400 bars, respetivamente.
Laboratório de Optoeletrónica para Sistemas de Sensores
O laboratório de optoeletrónica possui equipamentos e ferramentas de última geração para o desenvolvimento, fabricação e teste de sistemas de sensores baseados em fibra ótica.
A capacidade de construção de dispositivos de fibra ótica como grades de Bragg, grades de longo período, cones, acopladores e interferómetros proporcionam grande versatilidade no desenvolvimento de novos sistemas de sensores óticos. Além disso, os sistemas de revestimento (evaporação, pulverização catódica, revestimento de polímero) permitem explorar novos materiais funcionais, como filmes finos e materiais nanoestruturados com propriedades de deteção aumentadas.
Uma gama de fontes óticas, analisadores de espectro, unidades de varredura a laser permitem testar e desenvolver novos sistemas de interrogação para operação remota em tempo real usando interferometria, espectroscopia de absorção (NIR) e fluorescência. Uma diversidade de instalações de teste está disponível para caracterizar a resposta dos sensores a parâmetros mecânicos (deformação, temperatura, vibração), corrente elétrica, gases e produtos químicos dissolvidos e voláteis.
Alguns equipamentos a destacar:
- Unidades de fabricação de grades Bragg projetadas e montadas em casa (2X);
- Sistema de varredura a laser Braggmeter FS2200SA para interrogação remota de sensores de fibra óptica;
- Máquinas de emenda e clivagem (Fitel) para clivagem e fusão de fibras padrão e especiais (polarização, ângulo);
- Espectrofotômetro UV / VIS de duplo feixe, Sistema Hitachi para caracterização espectral de soluções e filmes sólidos;
- Analisador de espectro óptico ANDO. Analisador espectral de fibra óptica para banda do visível e telecom (600 nm – 1700nm);
- Espectrômetro UV / VI CCD (Ocean Optics). Analisador de espectro USB de fibra óptica portátil (400 nm – 900 nm);
- Amplificador Lock-in SRS 844, amplificador lock-in de alta frequência (200 Mhz);
- Ar laser com duplicação de frequência. Laser UV usado para processos fotolitográficos (comprimentos de onda: 488nm e 244nm);
- Espectrofotômetro FTIR de feixe duplo. Sistema para Espectroscopia de Infravermelho com Transformada de Fourier adequado para análise química;
• Cromatograma de gás. Sistema de cromatrografia a gás para análises químicas complexas.
CINTAL
O CINTAL está localizado na Universidade do Algarve em Faro, sendo actualmente constituído por três laboratórios principais, entre os quais o Laboratório de Processamento de Sinais SiPLAB (http://www.siplab.fct.ualg.pt/) que acolhe a maior parte da atividade de investigação e desenvolvimento tecnológico do CINTAL na área aquática.
As instalações do CINTAL / SiPLAB incluem equipamento acústico subaquático (http://www.siplab.fct.ualg.pt/equipment.shtml) bem como know-how para operações no mar. Os colaboradores do SiPLAB / CINTAL tem longa experiência na realização de operações no mar (http://www.siplab.fct.ualg.pt/seatrials.shtml) efetuando testes no mar em vários locais no mundo incluindo: Havaí, Noruega, Brasil, Portugal, França e Itália; e desenvolveu protótipos no decurso dos projetos de investigação.
Durante as operações no mar, o CINTAL recolheu um grande conjunto de dados de sons subaquáticos que estão disponíveis para análise e processamento de terceiros.
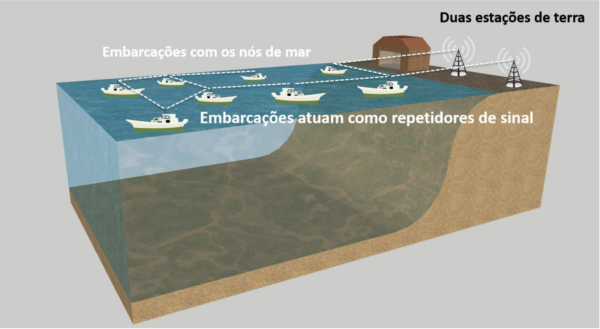
MARBED - MARitime wireless networks testbed
O MARBED é um banco de ensaio de redes sem fio marítimas composto por duas estações de terra e oito módulos marítimos implantados em navios de pesca que navegam na linha costeira da área metropolitana do Porto até 10 milhas náuticas da costa. O MARBED está em operação desde abril de 2013 e no médio prazo evoluirá para quatro estações de terra e trinta …

Laboratório de acústica offshore
A TEC4SEA dispõe ainda de um laboratório offshore (cablado) para realização de experiências de acústica submarina, localizado nas instalações da Docapesca em Sagres e no sopé das ilhotas do Martinhal. Este laboratório está em fase final de preparação, devendo estar operacional no Segundo trimester de 2022.

Apoio Portuário
Para facilitar o acesso rápido à água, a TEC4SEA dispõe de instalações na área portuária de Leixões, um dos maiores portos portugueses, perto da cidade do Porto, as quais permitem condições de trabalho a equipas cujos projetos necessitem de acesso frequente à água para teste/validação de equipamentos.